|
Categorie
Winzipedia Uso dell'wiki |
Robotica /
05-1L7-MappeDiOccupazioneRobotica.05-1L7-MappeDiOccupazione VersioniMostra le modifiche minori - Mostra le modifiche da evidenziare Aggiunte le linee 88-89:
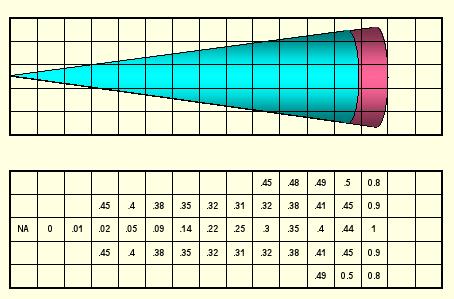
Esempio di una griglia di occupazione costruita tramite misurazioni di un sensore sonar:  Modificata la linea 15: da:
a:
Modificata la linea 17: da:
a:
Aggiunta la linea 85:
 Modificata la linea 76: da:
a:
Modificate le linee 79-84: da:
a:
Cancellata la linea 86:
 Modificate le linee 68-71: da:
a:
Modificata la linea 77: da:
p(z|mx,y)
a:
p(z|mx,y)
Modificate le linee 46-48: da:
P(mx,y): Prob che la cella x,y sia occupata zt: Rappresenta la misurazione t ottenuta dal sensore a:
Aggiunta la linea 52:
Modificate le linee 61-62: da:
a:
Modificata la linea 64: da:
a:
Modificate le linee 66-67: da:
a:
Modificate le linee 39-40: da:
a:
Cancellate le linee 42-45:
>>>>>>> SottosezioneContenuto della sottosezione. Modificate le linee 42-43: da:
a:
>>>>>>> Modificata la linea 45: da:
Contenuto della sottosezione. a:
Contenuto della sottosezione. Modificate le linee 6-10: da:
Contenuto del sommario.
SezioneContenuto della sezione. a:
19/10/2006 ore 21:03 CEST
di - Creazione della pagina
Aggiunte le linee 1-12:
Lezione 6: le mappe di occupazione (L1.7)Autori: Testa Sommario
Contenuto del sommario.
SezioneContenuto della sezione. SottosezioneContenuto della sottosezione. |