
|
Categorie
Winzipedia Uso dell'wiki |
Robotica /
06-1L9-SLAM1Robotica.06-1L9-SLAM1 VersioniMostra le modifiche minori - Mostra le modifiche da evidenziare 13/11/2006 ore 12:51 CET
di - Spostata un'immagine, grazie PastaAlPesto ;)
Aggiunta la linea 59:
 Modificate le linee 64-67: da:
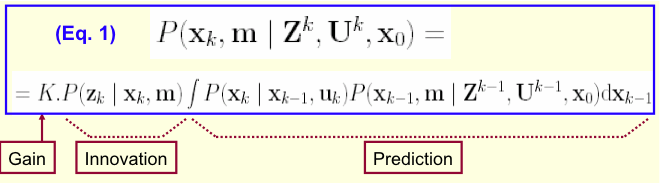
La riformulazione ricorsiva della formula, con la successiva applicazione del teorema di Bayes ci permette di scrivere: a:
La formulazione ricorsiva della formula, con la successiva applicazione del teorema di Bayes ci permette di scrivere: Aggiunte le linee 31-33:
Modificate le linee 63-64: da:
FORMULA slide 22 a:
Modificate le linee 67-68: da:
FORMULA slide 23 a:
 Modificate le linee 71-72: da:
FORMULA slide 25 a:
 Modificate le linee 84-85: da:
FORMULA SLIDE 8 a:
 Modificate le linee 90-91: da:
FORMULA SLIDE 9 a:
 Aggiunte le linee 28-29:
Approccio statistico allo SLAMSchema dello SLAMCancellate le linee 30-31:
Approccio statistico allo SLAM31/10/2006 ore 11:11 CET
di - Mancano formule
Modificate le linee 81-82: da:
Si noti il vettore colonna dei rumori. a:
Si noti il vettore colonna dei rumori, che modella l'errore fra comando richiesto ed effetto dell'azione. Modificate le linee 87-88: da:
Si noti anche qui il vettore colonna dei rumori. a:
Si noti anche qui il vettore colonna dei rumori che modella l'errore di lettura. Modificate le linee 91-99: da:
Si dimostra che il metodo EKF converge al crescere di k. Ogni osservazione riduce l'incertezza. a:
31/10/2006 ore 10:59 CET
di - Mancano le formule e i vantaggi/svantaggi
Modificate le linee 73-91: da:
a:
29/10/2006 ore 18:52 CET
di - Mancano le formule e l'ultimo pezzo dell'EKF
Aggiunte le linee 68-73:
29/10/2006 ore 17:43 CET
di - SLAM I praticamente finito
Aggiunte le linee 55-56:
Modificate le linee 50-55: da:
Parlando intuitivamente dello SLAM, abbiamo parlato di ipotesi che vengono formulate con un certo grado di incertezza: matematicamente parlando, questo significa generare dei modelli statistici che descrivano il sistema. a:
Modificata la linea 42: da:
Obiettivo dello SLAMa:
Lo SLAM come processo d'inferenzaModificata la linea 49: da:
Parametrizzazione dell'incertezzaa:
Parametrizzazione dell'incertezzaAggiunta la linea 29:
Grandezze d'interesseAggiunta la linea 42:
Obiettivo dello SLAMAggiunta la linea 49:
Parametrizzazione dell'incertezzaModificate le linee 1-2: da:
SLAM 1: Simultaneous Localization and Mappinga:
SLAM 1/2: Simultaneous Localization and MappingAggiunte le linee 43-46:
In particolare, partendo da questa formulazione generica dello SLAM, distinguiamo due casi particolari, che ricadono nelle teorie viste precendemente: - Conosco m a priori, misuro Z_k e vorrei determinare solo X_k: dallo SLAM generico siamo passati al caso di localizzazione - Conosco X_k a priori, misuro Z_k e vorrei determinare solo m: dallo SLAM generico siamo passati al caso di mapping Modificata la linea 21: da:
Fondamenti dello SLAMa:
Approccio intuitivo allo SLAMModificate le linee 26-37: da:
a:
Modificata la linea 3: da:
Autori: Andrea Calvo?\\ a:
Autori: Andrea\\ Modificate le linee 7-9: da:
Contenuto del sommario.
Sezionea:
26/10/2006 ore 18:16 CEST
di - Creazione della pagina
Aggiunte le linee 1-13:
SLAM 1: Simultaneous Localization and MappingAutori:Andrea Calvo Sommario
Contenuto del sommario.
SezioneContenuto della sezione. SottosezioneContenuto della sottosezione. |